
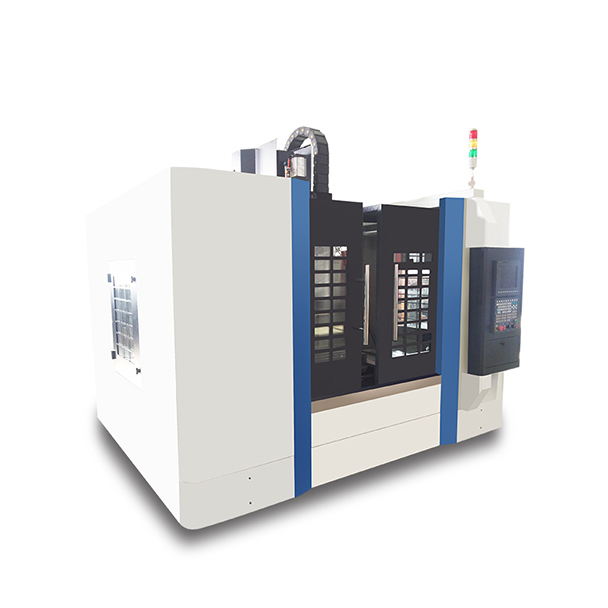


vmc1060 գործարանային մետաղական 3 առանցք ուղղահայաց cnc ֆրեզերային հաստոց կենտրոն
Առավելություն
1. Ընտրովի CNC պտտվող սեղանը կարող է ձևավորել չորս առանցք և հինգ առանցք կոորդինատային կապի մշակում:
2. Լրացուցիչ ավտոմատ չիպերի հեռացման սարք, մահճակալի կառուցվածքով ներքին մաքրությունն ապահովելու համար;կամընտիր spindle յուղի սառեցում և այլն:
3. Ձուլումը ենթարկվում է երկու ծերացման ընթացակարգերի՝ նյութի մնացորդային սթրեսը վերացնելու համար:
4. X, Y, Z ուղղության ուղեցույցները կարող են ընտրել Թայվանի ծանր գծային գնդիկավոր ուղեցույցները, որոնք ունեն արագ արագության, բարձր կոշտության և այլնի բնութագրեր:

Հստակեցում
| Նյութ | VMC1060 | ||||
| Աշխատանքային սեղանի չափս (երկարություն×լայնություն) մմ | 1300×600 | ||||
| T բնիկ (մմ) | 5-18×100 | ||||
| Աշխատանքային սեղանի վրա առավելագույն ծանրաբեռնվածություն (KG) | 650 թ | ||||
| X առանցքի ճանապարհորդություն (մմ) | 1000 | ||||
| Y-առանցքով ճանապարհորդություն (մմ) | 600 թ | ||||
| Z-առանցքի ճանապարհորդություն (մմ) | 600 թ | ||||
| Հեռավորությունը լիսեռի քթի և սեղանի միջև (մմ) | 100-700 թթ | ||||
| Հեռավորությունը լիսեռի կենտրոնի և սյունակի միջև (մմ) | 667 թ | ||||
| Spindle կոն | BT40/50 | ||||
| Մաքս.spindle արագություն (rpm) | 8000/10000/12000 | ||||
| Spindle շարժիչի հզորությունը (KW) | 11/15 | ||||
| Սնուցման արագ արագություն՝ X, Y, Z առանցք (մ/րոպե) | 16/16/16 (24/24//24 գծային ուղեցույց) | ||||
| Արագ կտրման արագություն (մ / րոպե) | 10 | ||||
| Դիրքի ճշգրտություն (մմ) | ±0,005 | ||||
| Կրկնել դիրքի ճշգրտությունը (մմ) | ±0,003 | ||||
| Գործիքների ավտոմատ փոխարկիչի տեսակը | 16 գործիքների գլխի տիպի գործիքի փոխարկիչ (ըստ ցանկության 24 թևի տիպի ավտոմատ գործիքի փոխարկիչ) | ||||
| Մաքս.գործիքի երկարությունը (մմ) | 300 | ||||
| Մաքս.Գործիքի տրամագիծը | Φ80 (հարակից գործիք)/φ150 (ոչ հարակից գործիք) | ||||
| Գործիքի առավելագույն քաշը (կգ) | 8 | ||||
| Գործիքների փոփոխման ժամանակ (գործիքից գործիք) վրկ | 7 | ||||
| Օդի ճնշում (Mpa) | 0.6 | ||||
| Մեքենայի քաշը (կգ) | 7500 | ||||
| Ընդհանուր չափս (մմ) | 3340*2800*2700 | ||||
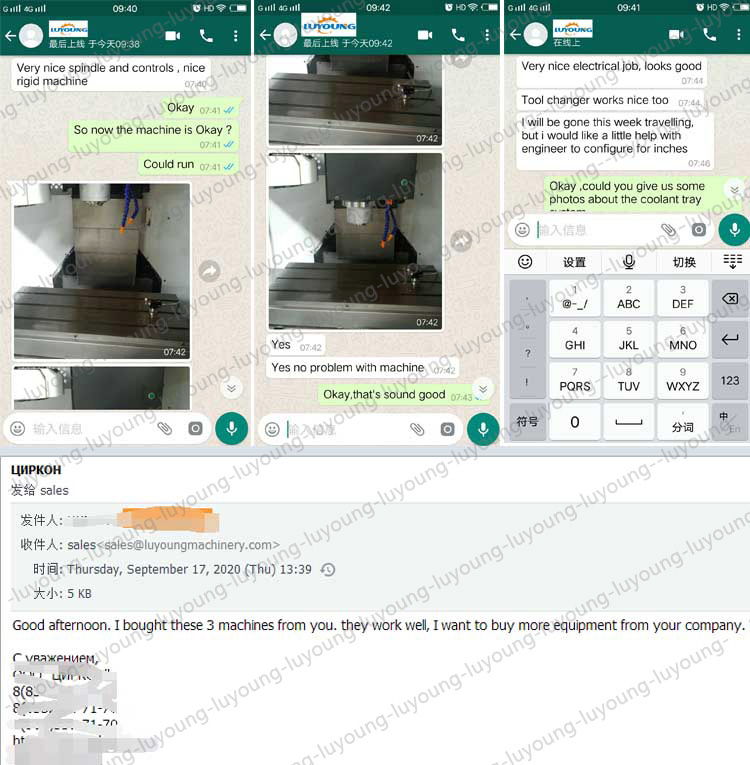
Ինչու՞ ընտրել մեզ
Մենք շատ լավ արձագանքներ ենք ստանում հաճախորդներից, օրինակ՝
Շատ գեղեցիկ spindle և հսկիչներ, գեղեցիկ կոշտ մեքենա:Շատ լավ էլեկտրական աշխատանք է, լավ տեսք ունի:
Գործիքների փոխարկիչը նույնպես լավ է աշխատում:
Ես ձեզանից գնել եմ 3 մեքենա:Նրանք լավ են աշխատում, ես ուզում եմ ավելի շատ սարքավորումներ գնել ձեր ընկերությունից:
Մեքենայի փորձարկում
1. Գծային շարժման դիրքորոշման ճշգրտության հայտնաբերումը պետք է իրականացվի առանց ծանրաբեռնվածության պայմաններում, և գերակայում է լազերային չափումը:
2. Գծային շարժման կրկնվող դիրքավորման ճշգրտության հայտնաբերում, հայտնաբերման համար օգտագործվող գործիքը նույնն է, ինչ օգտագործվում է դիրքավորման ճշգրտությունը հայտնաբերելու համար:
3. Գծային շարժման սկզբնավորման վերադարձի ճշգրտության հայտնաբերում.
4. Գծային շարժման հակադարձ սխալի հայտնաբերումը չափվում է մի քանի անգամ (ընդհանուր առմամբ 7 անգամ) երեք դիրքերում՝ հարվածի միջնակետին և երկու ծայրերին մոտ, և յուրաքանչյուր դիրքի միջին արժեքը հաշվարկվում է, և ստացված միջին արժեքի առավելագույն արժեքը՝ հակադարձ Սխալի արժեքը:

Ապրանքների կատեգորիաներ
-

BC6085 Գործարանային գների ձևավորման հաստոց՝ ...
-

TCK25 փոքր ավտոմատ բարձրորակ բանդա տեսակի sl...
-

C6140/C6240 բացը մահճակալ մետաղական կենտրոնի խառատահաստոց մեքենա
-

VMC650 Բարձր արագությամբ 3 առանցք ուղղահայաց մետաղական cnc mil...
-

H50 մետաղական շրջադարձային cnc համակցված խառատային ֆրեզերային մեքենա...
-

BC6050 բարձրորակ մետաղի ձևավորման մեքենա





