AWR25 ադամանդի կտրող cnc խառատահաստոց ալյումինե անիվների վերանորոգման և եզրերի վերանորոգման համար
Ալյումինե անիվների վերանորոգման մեքենայի ճշգրտում
| Ալյումինե անիվների վերանորոգման մեքենա | AWR22 | AWR25 | AWR28 | AWR32 | |
| CNC վերահսկիչ | Սենսորային էկրանի գործարկում 17 դյույմ LCD էկրան | ||||
| Մաքս.ցատկել անկողնու վրայով Դիա. | 610 թ | Ֆ635 | Φ770 (30') | Φ880 (34') | |
| Մաքս.Բեռնվածք Ալյում.հեծ. Չափ | 22 դյույմ | 22 դյույմ | 28 դյույմ | 32 դյույմ | |
| Կրիչի կարգավորելի հարված X ուղղությամբ | 100 մմ | 100 մմ | 100 մմ | 100 մմ | |
| Խաչաձև սլայդով ճանապարհորդություն (մմ) | 300 | 320 թ | 390 թ | 450 թ | |
| Ռելսի լայնությունը (մմ) | 260 թ | 300 | 330 թ | 400 | |
| Երկաթուղու երկարությունը (մմ) | 500 | 700 թ | 750 թ | 750 թ | |
| Սեղմման տեսակը | 10' չակ /եսակենտրոն | 12' չակ/ինքնակենտրոն անիվի սեղմում | 16' չակ/ինքնակենտրոն անիվի սեղմում | ||
| Զոնդի տեսակը | Զոնդ կամ լազեր | ||||
| Գծի արագության միջակայք (RPM) | 50-2500 | 50-2500 | 50-2000 թթ | 50-1800 թթ | |
| Spindle արագության վերահսկում | Ավտոմատ | Ավտոմատ | Ավտոմատ | Ավտոմատ | |
| Ողերի փոս (մմ) | Ֆ60 | Ֆ60 | Ֆ82 | Ֆ82 | |
| Մաքս.գործիքի փականի չափը | 25×25 մմ | 25×25 մմ | 25×25 մմ | 25×25 մմ | |
| Գործիքների կրիչի կայաններ | 4 դիրք | 4 դիրք | 4 դիրք | 4 դիրք | |
| Min.շարժիչի կարգավորող միավոր | (Z) երկարությունը 0,001 մմ | ||||
| (X) խաչ 0,001 մմ | |||||
| Գրառման շարժման արագությունը | (Z) երկարությունը 8 մ/րոպե | ||||
| (X) խաչ 6մ/րոպե | |||||
| Շարժիչի հզորությունը | 4 կՎտ | 4 կվտ | 5,5 կՎտ | 7,5 կՎտ | |
| Մակերեւույթի կոշտություն | Ra 0,8-1,6 | ||||
| Մեքենայի չափը | (L×W×H) (մմ³) | 1900*1400*1750 | 2100*1500*1750 | 1990 × 1600 × 1860 | 2470×1660×2080 |
| Փաթեթի չափը (մմ) | 2000*1400*1750 | 2200*1500*1950 թ | 2150×1750×2100 | 2620×1810×2300 | |
| Զտաքաշ | 1300 կգ | 1700 կգ | 2000 կգ | 2500 կգ | |
Հատկություններ
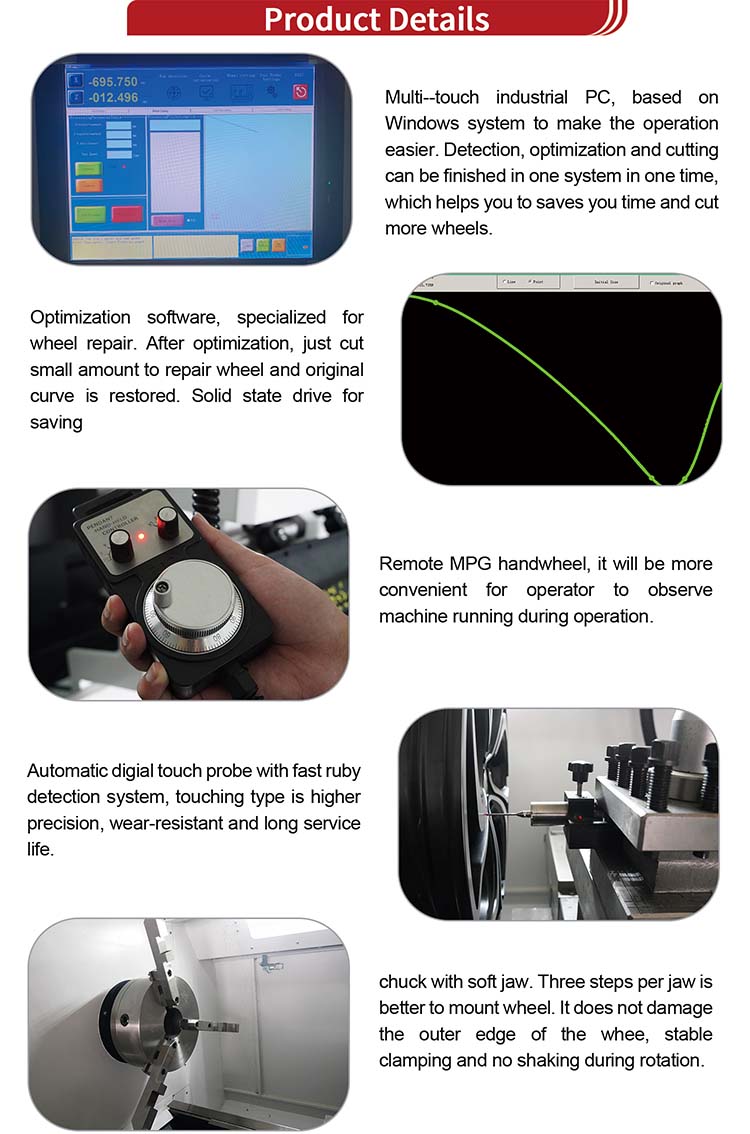
1. Muli--touch արդյունաբերական ԱՀ-ն, որը հիմնված է Windows համակարգի վրա՝ աշխատանքը հեշտացնելու համար:Հայտնաբերումը, օպտիմիզացումը և կտրումը կարող են ավարտվել մեկ համակարգում մեկ անգամ, ինչը կօգնի ձեզ խնայել ձեր ժամանակը և կտրել ավելի շատ անիվներ:
2. Օպտիմալացման ծրագիր, որը մասնագիտացված է անիվների վերանորոգման համար:Օպտիմալացումից հետո պարզապես փոքր քանակությամբ կտրեք անիվը վերանորոգելու համար և սկզբնական կորը վերականգնվում է:Պինդ վիճակ խնայելու համար:
3. Հեռակառավարվող MPG ձեռքի անիվ, օպերատորի համար ավելի հարմար կլինի դիտարկել մեքենայի աշխատանքը շահագործման ընթացքում:
4. Ավտոմատ թվային հպման զոնդ արագ ռուբինի հայտնաբերման համակարգով, հպման տեսակն ավելի բարձր էճշգրտություն, մաշվածության դիմացկուն և երկար սպասարկման ժամկետ:
5. փափուկ ծնոտով չակ.Երեք քայլ մեկ ծնոտի համար ավելի լավ է անիվը ամրացնել:Չի վնասումշիճուկի արտաքին եզրը, կայուն սեղմում և պտտման ընթացքում ցնցում չկա:
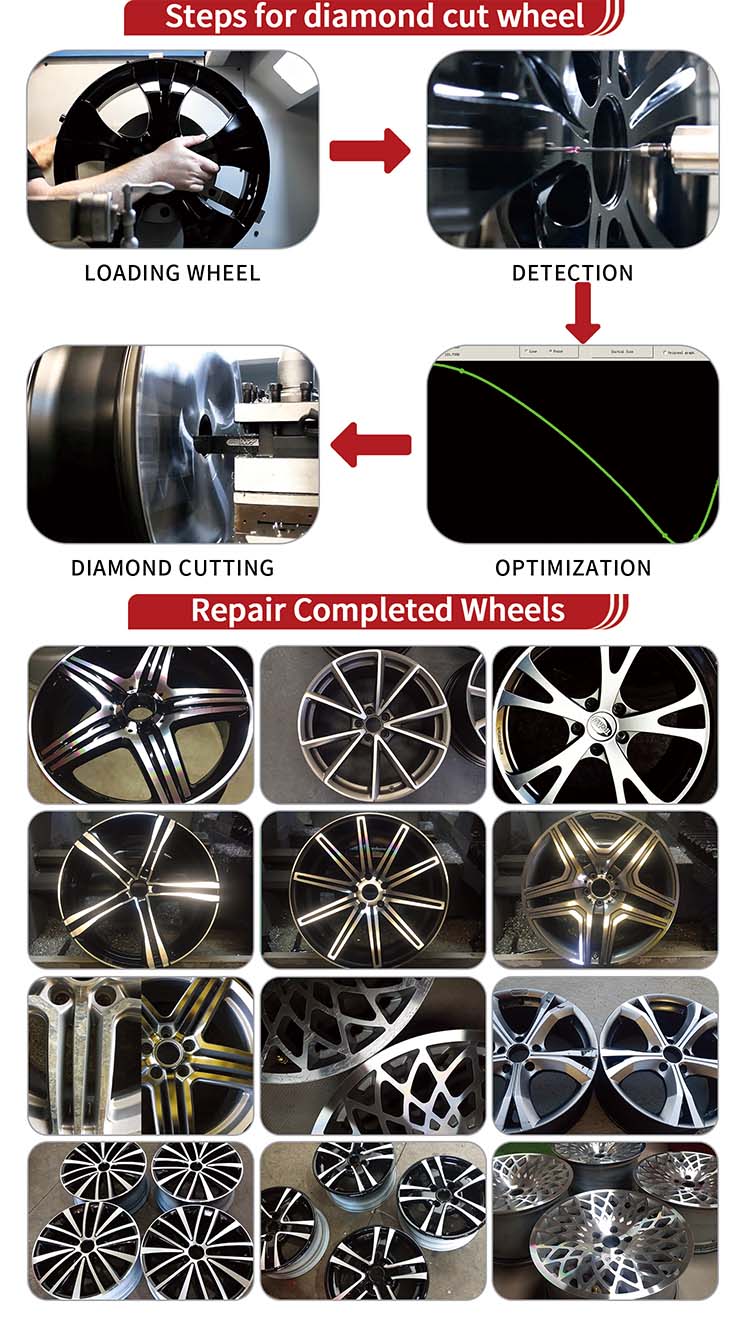
Քայլեր ադամանդե անիվի համար
1. Բեռնման անիվ. Տեղադրեք վերանորոգման ենթակա անիվի հանգույցը ճիշտ դիրքում:
2. Հայտնաբերում, ինֆրակարմիր զոնդը հայտնաբերում է հանգույցի մակերեսը:
3. Օպտիմալացում, հատուկ օպերացիոն համակարգ, որը վերլուծում և ինտեգրում է տվյալները:
4. Ադամանդի կտրում, սկսեք պտույտի մշակումը: